- 진정한 선형 제어: 페달 입력과 제동력 간의 직접적이고 비례적인 관계로 정밀한 조작이 가능합니다.
- 다중 구동 동기화: 복잡한 다중 액추에이터 시스템에서 균형 잡힌 제동을 보장합니다.
- 검증된 신뢰성: 강력한 전기 및 기계적 보호 기능을 갖춘 가혹한 산업 환경을 위해 설계되었습니다.
- 유연한 통합: 신규 설치 및 개조 프로젝트 모두와 호환됩니다.
관련 제품
포괄적인 제동 솔루션을 위해 다음 관련 제품들을 고려하세요:
- Ed 시리즈 전자유압 스러스터 – 정밀한 힘과 제어
- DYT 시리즈 전기-유압 액추에이터 – 신뢰할 수 있는 작동
- YT1 시리즈 전기 유압 액추에이터 – 대체 액추에이터
산업용 모션 제어를 위한 정밀 제동
TPK 풋 페달 가변 주파수 컨트롤러는 크레인 회전 메커니즘 및 트롤리 구동 시스템을 포함한 고수요 산업 응용 프로그램을 위해 설계되었습니다. 고급 주파수 변환 기술과 풋 페달 입력을 통합함으로써 TPK 컨트롤러는 제동력을 정밀하게 실시간으로 조절할 수 있게 하여 중장비의 부드러운 감속과 안전한 정지를 제공합니다.
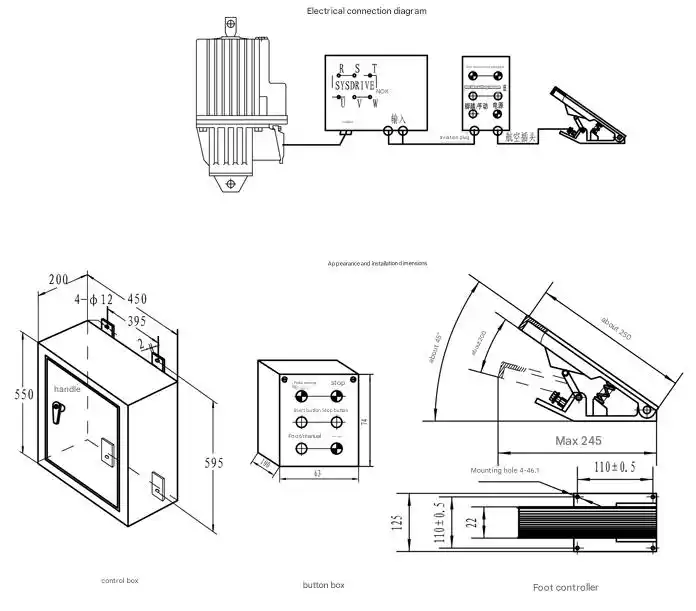
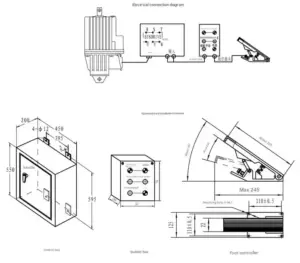
작동 원리
전통적인 제동 시스템이 고정 또는 단계적 제어에 의존하는 것과 달리, TPK 컨트롤러는 발 페달 신호의 진폭을 직접적으로 가변 출력 주파수로 변환합니다. 이 주파수는 액추에이터 모터의 속도와 추력을 정밀하게 조정하는 데 사용되어 제동 토크의 비례적이고 연속적인 제어를 제공합니다. 페달 위치와 제동력 간의 선형 관계는 운영자가 직관적으로 감속을 관리할 수 있게 하여 충격 하중을 최소화하고 기계 부품의 마모를 줄입니다.
동기화된 다중 구동 제어
TPK 컨트롤러는 다중 구동기 동기화를 지원하여 여러 액추에이터가 일관되게 작동하도록 합니다. 이 기능은 대규모 크레인 및 겐트리 시스템에 필수적이며, 고르지 않은 제동은 정렬 불량이나 구조적 스트레스를 초래할 수 있습니다. TPK 시스템은 모든 연결된 구동기에서 일관된 제동 성능을 유지하기 위해 제어 신호를 지능적으로 분배합니다.
기술 사양:
- 작동 온도: 비부식성, 먼지 없는 환경에서 -10°C에서 40°C.
- 전원 공급: 380 V, 50 Hz (산업 표준)
- 작동 주기: S3-60% (간헐적 작동)
- 최대 케이블 길이: 컨트롤러와 모터 사이 30미터.
- 응용 프로그램 호환성: 다양한 산업 전자기 및 유압 브레이크와의 통합을 위해 설계됨.
응용 시나리오
- 오버헤드 및 게이트리 크레인: 회전, 트롤리 및 브리지 구동 제동.
- 항만 장비:
- 컨테이너 크레인
- 선박 하역기
- 중량 리프팅 기계
- 금속 공학 및 광업: 고주파, 중량 하중 제동 환경
- 자동화 생산 라인: 동기화된 다중 지점 제동 제어가 필요한 시스템.
데이터 기반의 이점
- 향상된 안전성: 연구에 따르면 가변 주파수 제동 시스템은 전통적인 고정 제어 브레이크에 비해 정지 거리를 최대 25%까지 줄일 수 있으며, 이는 고중량 응용 분야에서 사고 위험을 크게 낮출 수 있습니다.
- 유지보수 감소: TPK 컨트롤러는 부드럽고 충격 없는 정지를 용이하게 하도록 설계되어 있으며, 이는 기계적 마모를 줄이고 액추에이터와 브레이크 패드의 서비스 수명을 연장하는 데 기여합니다. 업그레이드된 가변 주파수 제어 시스템에 대한 산업 데이터는 유지보수 비용이 20-30% 감소할 수 있음을 나타냅니다.
- 에너지 효율성: 주파수 변조는 모터 작동을 최적화하여 제동 주기 동안 불필요한 전력 소비를 줄입니다.
TPK 풋 페달 가변 주파수 컨트롤러를 선택해야 하는 이유?
- 진정한 선형 제어: 페달 입력과 제동력 간의 직접적이고 비례적인 관계로 정밀한 조작이 가능합니다.
- 다중 구동 동기화: 복잡한 다중 액추에이터 시스템에서 균형 잡힌 제동을 보장합니다.
- 검증된 신뢰성: 강력한 전기 및 기계적 보호 기능을 갖춘 가혹한 산업 환경을 위해 설계되었습니다.
- 유연한 통합: 신규 설치 및 개조 프로젝트 모두와 호환됩니다.
관련 제품
포괄적인 제동 솔루션을 위해 다음 관련 제품들을 고려하세요:
- Ed 시리즈 전자유압 스러스터 – 정밀한 힘과 제어
- DYT 시리즈 전기-유압 액추에이터 – 신뢰할 수 있는 작동
- YT1 시리즈 전기 유압 액추에이터 – 대체 액추에이터